Solving First-Order ODEs#
Teng-Jui Lin
Content adapted from UW AMATH 301, Beginning Scientific Computing, in Spring 2020.
Solving first-order ODEs
Methods
Forward Euler
Backward Euler
Midpoint method
Fourth-order Runge-Kutta (RK4) method
Error
scipyimplementationSolving first-order ODEs by
scipy.integrate.solve_ivp()
Solving first-order ODEs#
Suppose we have an ODE of the form
Forward Euler#
Forward Euler uses the forward difference as approximation for the derivative, having formula of
Backward Euler#
Backward Euler uses backward difference to approximate the derivative, having implicit formula of
At each step of backward Euler, \(y_{k+1}\) can be found by finding the root of
where \(y_k\) is known.
Midpoint method#
Midpoint method uses the slope at the midpoint as approximation for the derivative:
Do a half step of forward Euler using the slope at starting point \(k_1\), record the slope at midpoint \(k_2\)
Use the slope at the midpoint \(k_2\) to do a full step of forward Euler to find \(y_{k+1}\)
The method follows the steps
Fourth-order Runge-Kutta (RK4)#
Fourth-order Runge-Kutta method uses a weighted average of slopes at the midpoint and endpoint as approximation for the derivative:
Do a half step of forward Euler using the slope at starting point \(k_1\), record the slope at midpoint \(k_2\)
Use the slope at midpoint \(k_2\) to do another half step of forward Euler, record the new slope at midpoint \(k_3\)
Use the new slope at midpoint \(k_3\) to do a full step of forward Euler, record the slope at the endpoint \(k_4\)
Use a weighted average of all slopes \(k_1, k_2, k_3, k_4\) to find \(y_{k+1}\)
The method follows the steps
Errors of methods#
The order of errors of each method is shown below:
Method |
Order |
Global Error |
Local Error |
Explicit/Implicit |
|---|---|---|---|---|
Forward Euler |
1 |
\(\mathcal{O}(\Delta t)\) |
\(\mathcal{O}(\Delta t^2)\) |
Explicit |
Backward Euler |
1 |
\(\mathcal{O}(\Delta t)\) |
\(\mathcal{O}(\Delta t^2)\) |
Implicit |
Midpoint method (RK2) |
2 |
\(\mathcal{O}(\Delta t^2)\) |
\(\mathcal{O}(\Delta t^3)\) |
Explicit |
Fourth-order Runge-Kutta (RK4) |
4 |
\(\mathcal{O}(\Delta t^4)\) |
\(\mathcal{O}(\Delta t^5)\) |
Explicit |
Implementation#
Problem Statement. Consider the ODE
with the initial condition \(x(0) = \frac{\pi}{4}\). Its analytical solution is
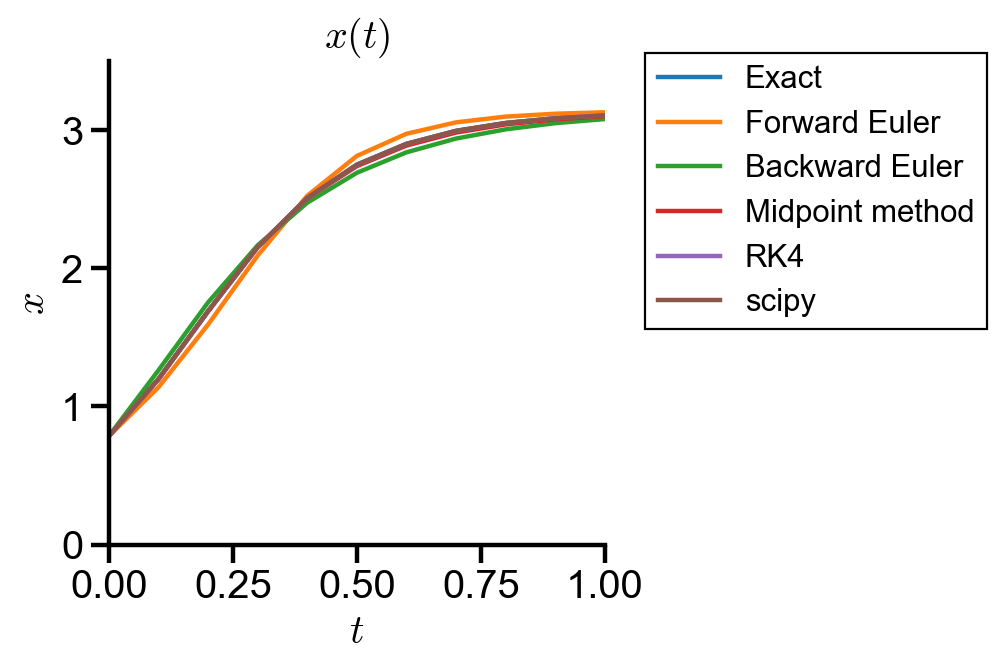
(a) Solve the ODE using backward Euler, forward Euler, midpoint method, RK4 method, and scipy.integrate.solve_ivp() from \(t\in [0, 1]\) with \(\Delta t = 0.05\).
(b) Compare the solution of each method with the analytical solution.
import numpy as np
import matplotlib.pyplot as plt
import scipy
from scipy import optimize, integrate
# define the ode and analytic soln
dxdt = lambda t, x : 5*np.sin(x)
x_exact = lambda t : 2*np.arctan(np.exp(5*t) / (1 + np.sqrt(2)))
# define time steps
dt = 0.1
t_initial = 0
t_final = 1
t = np.arange(t_initial, t_final+dt/2, dt)
t_len = len(t)
# forward euler
x_forward = np.zeros(t_len)
x_forward[0] = np.pi/4
for i in range(t_len - 1):
x_forward[i+1] = x_forward[i] + dxdt(t[i], x_forward[i])*dt
# backward euler
x_backward = np.zeros(t_len)
x_backward[0] = np.pi/4
for i in range(t_len - 1):
g = lambda y : y - x_backward[i] - dxdt(t[i+1], y)*dt
x_backward[i+1] = scipy.optimize.root(g, x_backward[i]).x
# midpoint method
x_midpoint = np.zeros(t_len)
x_midpoint[0] = np.pi/4
for i in range(t_len - 1):
k1 = dxdt(t[i], x_midpoint[i])
k2 = dxdt(t[i], x_midpoint[i] + k1*dt/2)
x_midpoint[i+1] = x_midpoint[i] + k2*dt
# rk4 method
x_rk4 = np.zeros(t_len)
x_rk4[0] = np.pi/4
for i in range(t_len - 1):
k1 = dxdt(t[i], x_rk4[i])
k2 = dxdt(t[i], x_rk4[i] + k1*dt/2)
k3 = dxdt(t[i], x_rk4[i] + k2*dt/2)
k4 = dxdt(t[i], x_rk4[i] + k3*dt)
x_rk4[i+1] = x_rk4[i] + (k1 + 2*k2 + 2*k3 + k4)*dt/6
# scipy.integrate.solve_ivp()
x_scipy = np.zeros(t_len)
x_scipy[0] = np.pi/4
x_scipy = scipy.integrate.solve_ivp(dxdt, [t[0], t[-1]], [t[0], x_scipy[0]], t_eval=t).y[1]
# plot settings
%config InlineBackend.figure_format = 'retina'
%matplotlib inline
plt.rcParams.update({
'font.family': 'Arial', # Times New Roman, Calibri
'font.weight': 'normal',
'mathtext.fontset': 'cm',
'font.size': 18,
'lines.linewidth': 2,
'axes.linewidth': 2,
'axes.spines.top': False,
'axes.spines.right': False,
'axes.titleweight': 'bold',
'axes.titlesize': 18,
'axes.labelweight': 'bold',
'xtick.major.size': 8,
'xtick.major.width': 2,
'ytick.major.size': 8,
'ytick.major.width': 2,
'figure.dpi': 80,
'legend.framealpha': 1,
'legend.edgecolor': 'black',
'legend.fancybox': False,
'legend.fontsize': 14
})
fig, ax = plt.subplots(figsize=(4, 4))
ax.plot(t, x_exact(t), label='Exact')
ax.plot(t, x_forward, label='Forward Euler')
ax.plot(t, x_backward, label='Backward Euler')
ax.plot(t, x_midpoint, label='Midpoint method')
ax.plot(t, x_rk4, label='RK4')
ax.plot(t, x_scipy, label='scipy')
ax.set_xlabel('$t$')
ax.set_ylabel('$x$')
ax.set_title('$x(t)$')
ax.set_xlim(t_initial, t_final)
ax.set_ylim(0, 3.5)
ax.legend(loc='upper left', bbox_to_anchor=(1.05, 1.05))
<matplotlib.legend.Legend at 0x1a9ef5d2248>
fig, ax = plt.subplots(figsize=(4, 4))
ax.plot(t, x_exact(t), label='Analytic', color='black')
ax.plot(t, x_forward, label='Forward Euler')
ax.plot(t, x_backward, label='Backward Euler')
ax.plot(t, x_midpoint, label='Midpoint method')
ax.plot(t, x_rk4, '-.', label='RK4')
ax.plot(t, x_scipy, '--', label='scipy')
ax.set_xlabel('$t$')
ax.set_ylabel('$x$')
ax.set_title('$x(t)$')
ax.set_xlim(0.5, 0.75)
ax.set_ylim(2.7, 3.1)
ax.legend(loc='upper left', bbox_to_anchor=(1.05, 1.05))
<matplotlib.legend.Legend at 0x1a9f1759648>
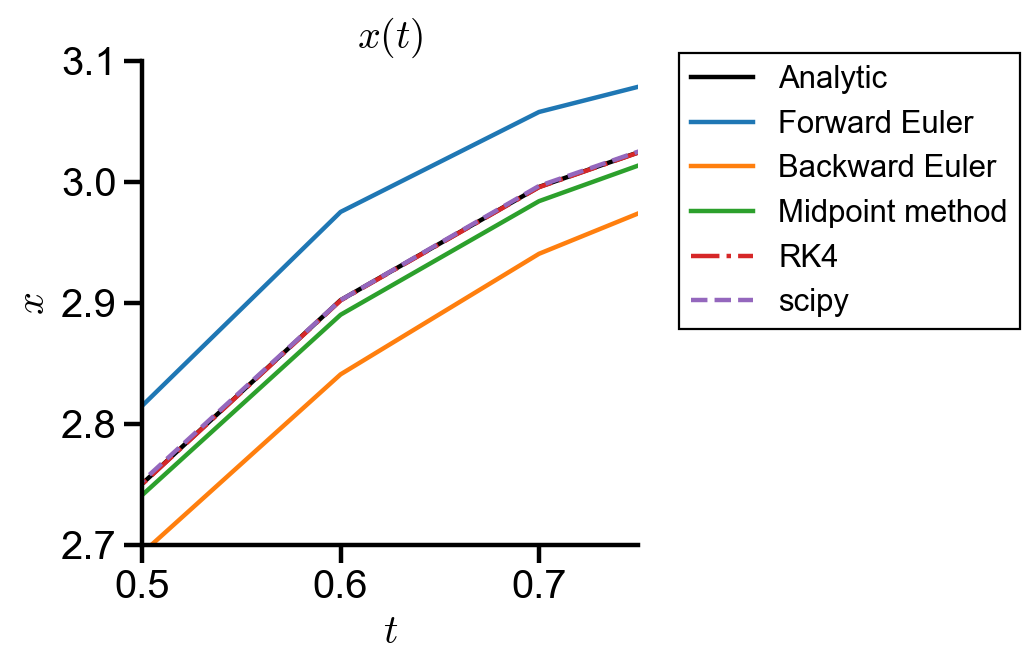
▲ The figure above shows the accuracy of each method. The RK4 and scipy solution agrees exactly with the analytic solution, having a fourth order error. The midpoint method is second closest to the analytic solution, having a second order error. Forward and backward Euler have the largest error, having a first order error.