Solving Higher-Order ODEs#
Teng-Jui Lin
Content adapted from UW AMATH 301, Beginning Scientific Computing, in Spring 2020.
Solving higher-order ODEs (systems of first-order ODEs)
Forward Euler
Backward Euler
scipyimplementationSolving systems of first-order ODEs by
scipy.integrate.solve_ivp()
Solving higher-order ODEs (system of ODEs)#
A higher-order ODE can always be written as a system of first-order ODEs. We can then solve the first-order ODE system using forward Euler, backward Euler, or scipy.integrate.solve_ivp().
Forward Euler#
Forward Euler for linear system has a similar form of
The method is stable when all of the absolute value of eigenvalues of \(\mathbf{I} + \Delta t \mathbf{A}\) are less than 1: \(|\lambda| < 1\).
Backward Euler#
Backward Euler for linear system has a similar form of
that can be implemented as
which can be implemented with LU decomposition. The method is stable when all of the absolute value of eigenvalues of \((\mathbf{I} - \Delta t \mathbf{A})^{-1}\) are less than 1: \(|\lambda| < 1\).
Implementation#
Problem Statement. Linear pendulum.
The motion of a linear pendulum at small angles can be described by the linear second-order ODE
where \(\theta\) is the angle of deflection of the pendulum from the vertical. Given physical parameters \(L = 1 \ \mathrm{m}\) and \(g = 9.8 \ \mathrm{m/s^2}\).
The second-order ODE can be converted to a system of two first-order ODEs
which is equivalent to
where
For the initial conditions \(\theta(0) = 0, \dot{\theta}(0) = \omega(0) = 0.5\), we will solve the system of ODEs over \(t\in [0, 10] \ \mathrm{s}\) using numerical methods, then we compare the results with it analytical solution of
(a) Use forward Euler for linear system with \(\Delta t = 0.005 \ \mathrm{s}\) to solve the system. Determine the stability of the method and compare the error at final time with the analytical solution.
(b) Use backward Euler for linear system with \(\Delta t = 0.005 \ \mathrm{s}\) using LU decomposition. Determine the stability of the method and compare the error at final time with the analytical solution.
(c) Use scipy.integrate.solve_ivp() to solve the system. Compare the error at final time with the analytical solution.
Forward Euler#
import numpy as np
import matplotlib.pyplot as plt
import scipy
from scipy import integrate
# define physical constants
g = 9.8
l = 1
# define time array
t_initial = 0
t_final = 10
dt = 0.005
t = np.arange(t_initial, t_final+dt/2, dt)
t_len = len(t)
# define matrix and initial conditions
A = np.array([[0, 1], [-g/l, 0]])
x0 = np.array([0, 0.5])
x = np.zeros((2, t_len))
x[:, 0] = x0
# forward euler of linear system
for i in range(t_len - 1):
x[:, i+1] = x[:, i] + dt*A@x[:, i]
# compare with analytical soln
x_exact = lambda t : np.array([0.5 * np.sqrt(l/g) *np.sin(t*np.sqrt(g/l)),
0.5 * np.cos(t*np.sqrt(g/l))])
x_error = np.linalg.norm(x[:, -1] - x_exact(t_final))
print(f'Error = {x_error :.2f}')
Error = 0.14
# assess stability
stability_matrix = np.eye(len(A)) + dt*A
abs_eig = abs(np.linalg.eig(stability_matrix)[0])
if max(abs_eig) > 1:
print(f'Unstable with |lambda_max| = {max(abs_eig) :.4f}')
else:
print(f'Stable with |lambda_max| = {max(abs_eig) :.4f}')
Unstable with |lambda_max| = 1.0001
# plot settings
%config InlineBackend.figure_format = 'retina'
%matplotlib inline
plt.rcParams.update({
'font.family': 'Arial', # Times New Roman, Calibri
'font.weight': 'normal',
'mathtext.fontset': 'cm',
'font.size': 18,
'lines.linewidth': 2,
'axes.linewidth': 2,
'axes.spines.top': False,
'axes.spines.right': False,
'axes.titleweight': 'bold',
'axes.titlesize': 18,
'axes.labelweight': 'bold',
'xtick.major.size': 8,
'xtick.major.width': 2,
'ytick.major.size': 8,
'ytick.major.width': 2,
'figure.dpi': 80,
'legend.framealpha': 1,
'legend.edgecolor': 'black',
'legend.fancybox': False,
'legend.fontsize': 14
})
fig, ax = plt.subplots(figsize=(4, 4))
ax.plot(t, x_exact(t)[0], '--', label='Analytic')
ax.plot(t, x[0], label='Forward Euler')
ax.set_xlabel('$t \ [\mathrm{s}]$')
ax.set_ylabel('$\\theta \ [\mathrm{rad}]$')
ax.set_title('$\\theta(t)$')
ax.set_xlim(t_initial, t_final)
ax.set_ylim(-0.3, 0.3)
ax.legend(loc='upper left', bbox_to_anchor=(1.05, 1.05))
<matplotlib.legend.Legend at 0x2a5d7de2c88>
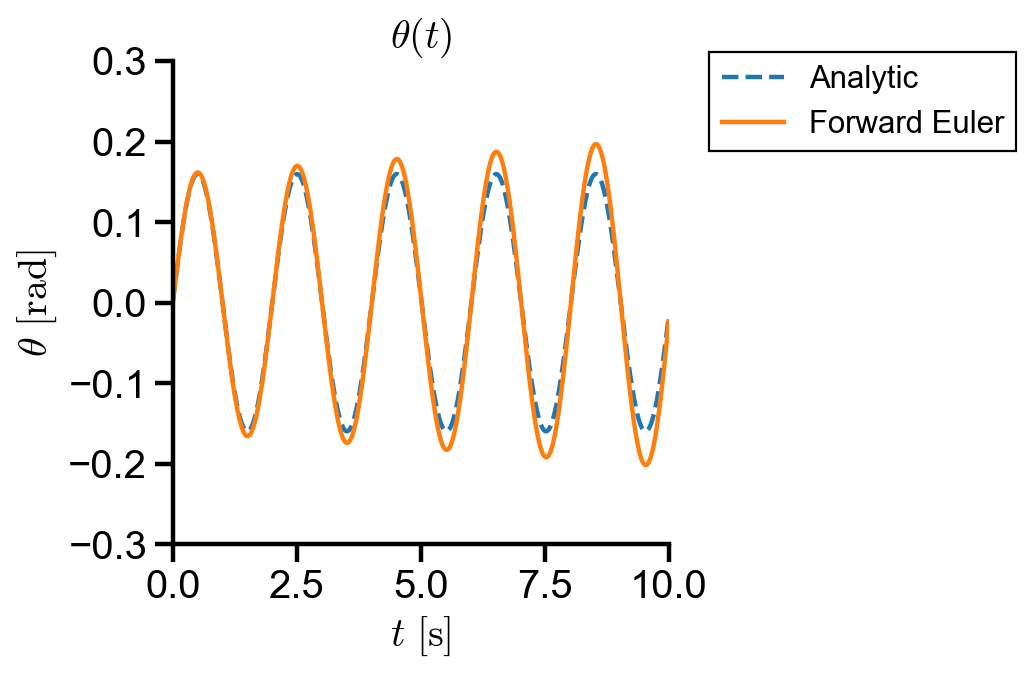
▲ Forward Euler has first order error and the amplitude grows over time compared to the analytic solution.
Backward Euler#
# define physical constants
g = 9.8
l = 1
# define time array
t_initial = 0
t_final = 10
dt = 0.005
t = np.arange(t_initial, t_final+dt/2, dt)
t_len = len(t)
# define matrix and initial conditions
A = np.array([[0, 1], [-g/l, 0]])
x0 = np.array([0, 0.5])
x = np.zeros((2, t_len))
x[:, 0] = x0
P, L, U = scipy.linalg.lu(np.eye(len(A)) - dt*A)
# backward euler of linear system
for i in range(t_len - 1):
y = np.linalg.solve(L, P@x[:, i])
x[:, i+1] = np.linalg.solve(U, y)
# compare with analytical soln
x_exact = lambda t : np.array([0.5 * np.sqrt(l/g) *np.sin(t*np.sqrt(g/l)),
0.5 * np.cos(t*np.sqrt(g/l))])
x_error = np.linalg.norm(x[:, -1] - x_exact(t_final))
print(f'Error = {x_error :.2f}')
Error = 0.11
# assess stability
stability_matrix = np.linalg.inv(np.eye(len(A)) - dt*A)
abs_eig = abs(np.linalg.eig(stability_matrix)[0])
if max(abs_eig) > 1:
print(f'Unstable with |lambda_max| = {max(abs_eig) :.4f}')
else:
print(f'Stable with |lambda_max| = {max(abs_eig) :.4f}')
Stable with |lambda_max| = 0.9999
fig, ax = plt.subplots(figsize=(4, 4))
ax.plot(t, x_exact(t)[0], '--', label='Analytic')
ax.plot(t, x[0], label='Backward Euler')
ax.set_xlabel('$t \ [\mathrm{s}]$')
ax.set_ylabel('$\\theta \ [\mathrm{rad}]$')
ax.set_title('$\\theta(t)$')
ax.set_xlim(t_initial, t_final)
ax.set_ylim(-0.3, 0.3)
ax.legend(loc='upper left', bbox_to_anchor=(1.05, 1.05))
<matplotlib.legend.Legend at 0x2a5d80d4108>
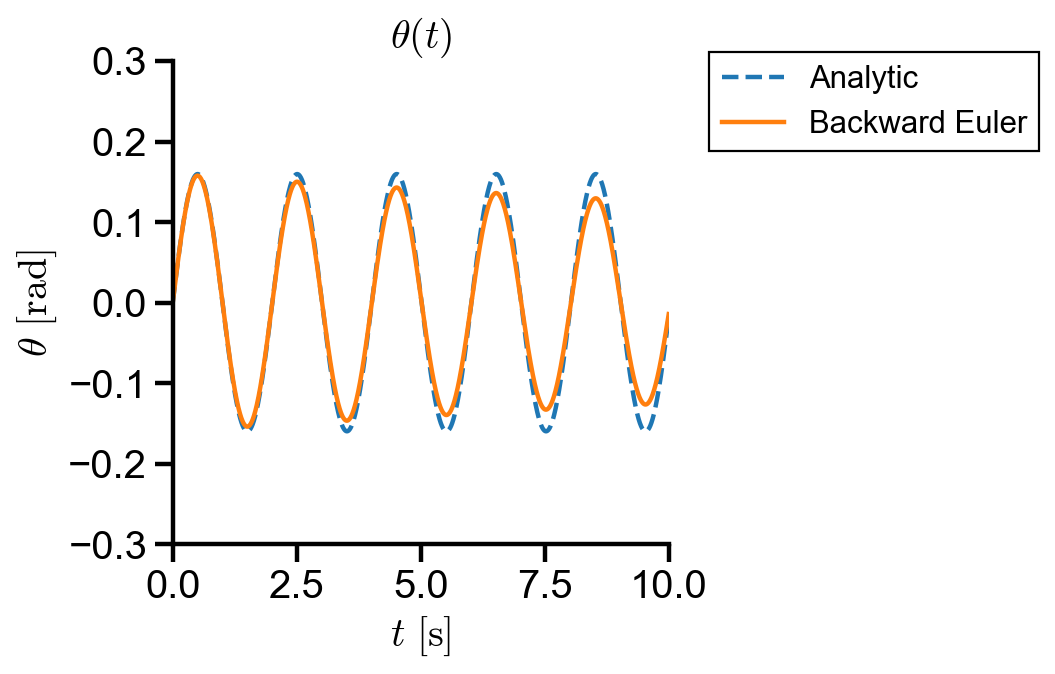
▲ Backward Euler has first order error and the amplitude decays over time compared to the analytic solution.
scipy.integrate.solve_ivp()#
# define physical constants
g = 9.8
l = 1
# define time array
t_initial = 0
t_final = 10
dt = 0.005
t = np.arange(t_initial, t_final+dt/2, dt)
t_len = len(t)
# define initial conditions
x0 = np.array([0, 0.5])
# define ode system
dtheta_dt = lambda theta, omega : omega
domega_dt = lambda theta, omega: -g/l*theta
ode_syst = lambda t, z : np.array([dtheta_dt(*z), domega_dt(*z)])
# solve ode system
scipy_soln = scipy.integrate.solve_ivp(ode_syst, [t_initial, t_final], x0, t_eval=t).y
# compare with analytical soln
x_exact = lambda t : np.array([0.5 * np.sqrt(l/g) *np.sin(t*np.sqrt(g/l)),
0.5 * np.cos(t*np.sqrt(g/l))])
x_error = np.linalg.norm(scipy_soln[:, -1] - x_exact(t_final))
print(f'Error = {x_error :.4f}')
Error = 0.0015
fig, ax = plt.subplots(figsize=(4, 4))
ax.plot(t, x_exact(t)[0], '--', label='Analytic')
ax.plot(t, scipy_soln[0], label='scipy')
ax.set_xlabel('$t \ [\mathrm{s}]$')
ax.set_ylabel('$\\theta \ [\mathrm{rad}]$')
ax.set_title('$\\theta(t)$')
ax.set_xlim(t_initial, t_final)
ax.set_ylim(-0.3, 0.3)
ax.legend(loc='upper left', bbox_to_anchor=(1.05, 1.05))
<matplotlib.legend.Legend at 0x2a5b61a6ec8>
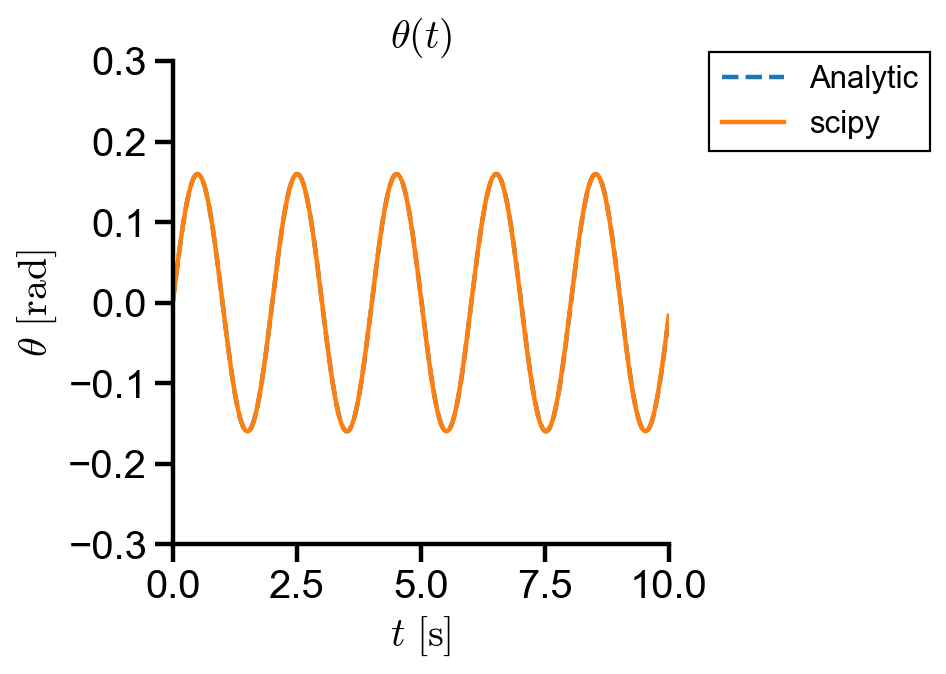
▲ The scipy implementation has fourth order error, agreeing with the analytic solution.