Neuron Excitation Model 1#
Teng-Jui Lin
Content adapted from UW AMATH 301, Beginning Scientific Computing. Although not covered in Spring 2020, the topic is presented in previous years.
Phase portraits
FitzHugh-Nagumo neuron excitation model
Base case: neural excitation
Exploration: one-eyed phase portrait
Exploration: loop phase portrait
Exploration: two-eyed phase portrait
FitzHugh-Nagumo neuron excitation model#
Let \(v\) be the membrane voltage, and let \(w\) be the activity of several types of membrane channel proteins. The FitzHugh-Nagumo model describes the excitation of neuron membrane over time with the system of ODEs
with an external electrical current \(I(t)\). The constant parameters \(a, b, \tau\) controls the activity of channel proteins.
Base case: neural excitation#
Problem Statement. With the initial conditions of \(v(0) = 1\) and \(w(0) = 0\), solve the FitzHugh-Nagumo model with parameters \(a=0.7, b=0.8, \tau=12.5\) and external current of
Generate plots of \(v(t)\) and \(w(t)\) over time in the intervals \(t \in [0, 50]\) and \(t \in [0, 200]\).
Generate an animated phase portrait over time in the interval \(t \in [0, 50]\).
Note on animation: for local reproducible results, download ffmpeg and add to path variable. For reproducible results online, use Google Colab and run the command below.
# Run the command in Google Colab for reproducible results online
# !apt install ffmpeg
Plot over time#
import numpy as np
import matplotlib.pyplot as plt
import scipy
from scipy import integrate
# model params
a = 0.7
b = 0.8
tau = 12.5
# time array
t_initial = 0
t_final = 200
t = np.linspace(t_initial, t_final, 4000)
t_len = len(t)
# ode system
I = lambda t : 1/10*(5 + np.sin(np.pi*t/10))
dvdt = lambda t, v, w : v - 1/3*v**3 - w + I(t)
dwdt = lambda t, v, w : (a + v - b*w) / tau
ode_syst = lambda t, z : np.array([dvdt(t, *z), dwdt(t, *z)])
# grid of initial conditions
initial_vvec = np.linspace(-2.5, 2.5, 10)
initial_wvec = np.linspace(-2, 2, 10)
initial_vals = np.meshgrid(initial_vvec, initial_wvec)
initial_vals = np.array([initial_vals[0].reshape(-1), initial_vals[1].reshape(-1)]).T
# ode soln for grid of initial conditions
ode_solns = [0]*len(initial_vals)
for i in range(len(initial_vals)):
ode_solns[i] = scipy.integrate.solve_ivp(ode_syst, [t_initial, t_final], initial_vals[i], t_eval=t).y
ode_solns = np.array(ode_solns)
# quiver grid
vvec = np.linspace(-2.5, 2.5, 20)
wvec = np.linspace(-2, 2, 20)
V, W = np.meshgrid(vvec, wvec)
def custom_plot_settings():
%config InlineBackend.figure_format = 'retina'
%matplotlib inline
plt.rcParams.update({
'font.family': 'Arial', # Times New Roman, Calibri
'font.weight': 'normal',
'mathtext.fontset': 'cm',
'font.size': 18,
'lines.linewidth': 2,
'axes.linewidth': 2,
'axes.spines.top': False,
'axes.spines.right': False,
'axes.titleweight': 'bold',
'axes.titlesize': 18,
'axes.labelweight': 'bold',
'xtick.major.size': 8,
'xtick.major.width': 2,
'ytick.major.size': 8,
'ytick.major.width': 2,
'figure.dpi': 80,
'savefig.dpi': 300,
'legend.framealpha': 1,
'legend.edgecolor': 'black',
'legend.fancybox': False,
'legend.fontsize': 14,
'animation.html': 'html5',
})
custom_plot_settings()
fig, axs = plt.subplots(2, 1, figsize=(5, 5), sharex=True)
axs[0].set_ylabel('$v(t)$')
axs[1].set_ylabel('$w(t)$')
axs[1].set_xlabel('$t$')
for i in range(len(initial_vals)):
axs[0].plot(t, ode_solns[i, 0], label='$v(t)$', alpha=0.1)
axs[1].plot(t, ode_solns[i, 1], label='$w(t)$', alpha=0.1)
for i in range(2):
axs[i].plot([t_initial, t_final], [0, 0], '--', color='grey', lw=0.5, zorder=0) # zero ref
axs[i].set_xlim(t_initial, 50)
axs[i].set_ylim(-2.5, 2.5)
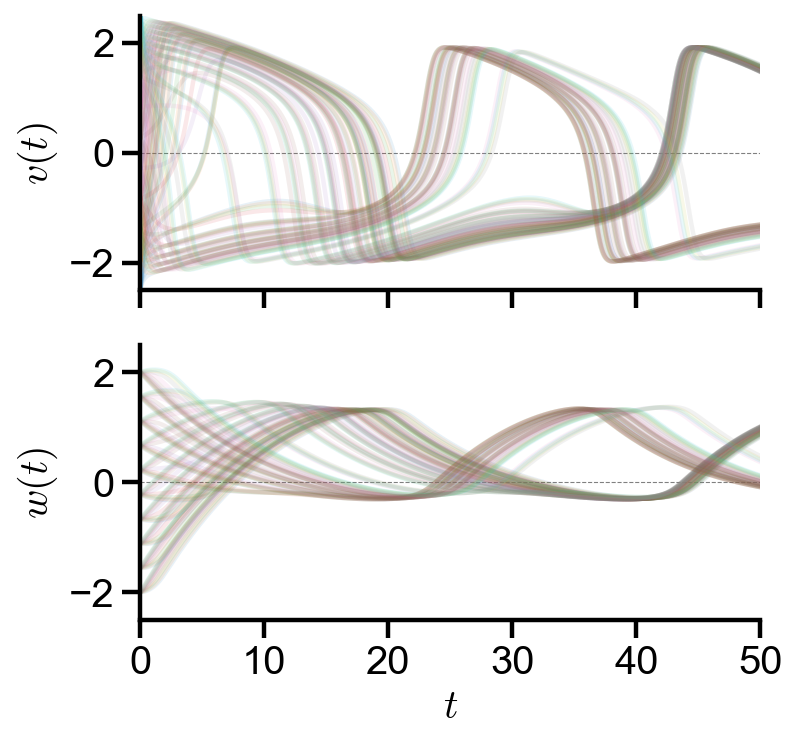
▲ Because of different initial conditions, the plot for \(t \in [0, 50]\) gives distinct \(v(t)\) and \(w(t)\) trajectories for each initial condition.
fig, axs = plt.subplots(2, 1, figsize=(5, 5), sharex=True)
axs[0].set_ylabel('$v(t)$')
axs[1].set_ylabel('$w(t)$')
axs[1].set_xlabel('$t$')
for i in range(len(initial_vals)):
axs[0].plot(t, ode_solns[i, 0], label='$v(t)$', alpha=0.1)
axs[1].plot(t, ode_solns[i, 1], label='$w(t)$', alpha=0.1)
for i in range(2):
axs[i].plot([t_initial, t_final], [0, 0], '--', color='grey', lw=0.5, zorder=0) # zero ref
axs[i].set_xlim(t_initial, t_final)
axs[i].set_ylim(-2.5, 2.5)
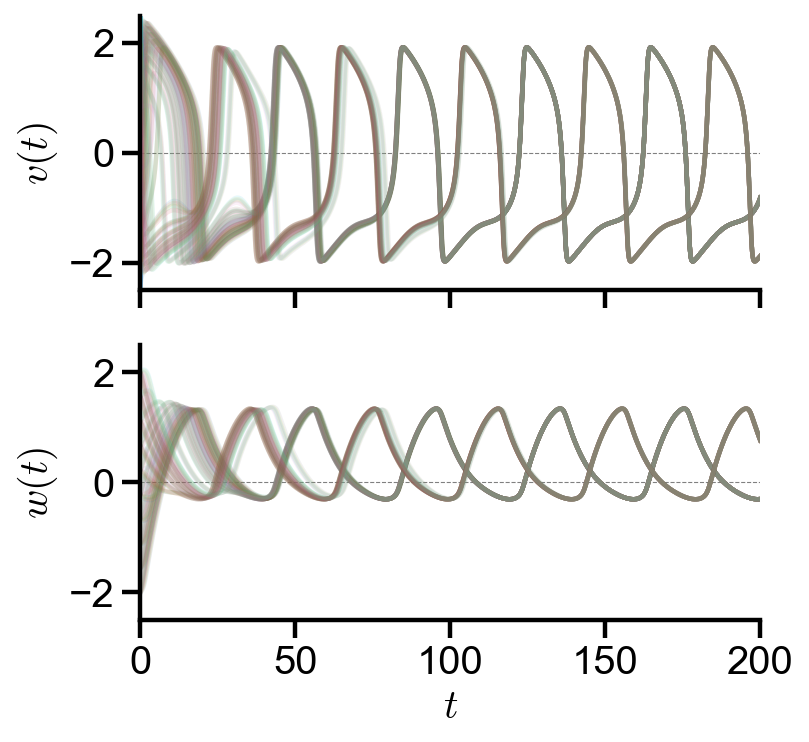
▲ For \(t \in [0, 200]\), the \(v(t)\) and \(w(t)\) trajectories converges for all initial conditions as time increases.
Animated phase portrait#
# ## interactive plot
# ## uncomment for testing
# ## used for checking time series before making animation
# ## can be used to test all animation below
# # plot settings
# custom_plot_settings()
# %matplotlib qt
# # plot static portion
# fig, ax = plt.subplots(figsize=(5, 5))
# ax.set_xlim(-2.5, 2.5)
# ax.set_ylim(-2, 2)
# ax.set_xlabel('$v(t)$')
# ax.set_ylabel('$w(t)$')
# plt.tight_layout()
# # plot empty framework
# points = np.zeros(len(initial_vals), dtype=object)
# current_points = np.zeros(len(initial_vals), dtype=object)
# for i in range(len(initial_vals)):
# points[i], = ax.plot([], [], '.', color='black', alpha=0.05)
# current_points[i], = ax.plot([], [], '.', color='red', alpha=0.2, zorder=10)
# scale = np.sqrt(dvdt(t[0], V, W)**2 + dwdt(t[0], V, W)**2)
# qr = ax.quiver(V, W, dvdt(t[0], V, W)/scale, dwdt(t[0], V, W)/scale,
# scale, cmap='winter_r', scale=20, width=0.005, zorder=3)
# title = ax.set_title('')
# # animation parameters
# t_range = int(t_len/4) # manually set t range, default t_len
# anim_time = 20 # s
# fps = 60
# frame_num = int(fps * anim_time)
# # update changes each frame
# for n in range(frame_num):
# time_points = round(t_range/frame_num)
# frame_final_time = min(time_points*n+time_points, t_range-1) # avoid index out of range
# for i in range(len(initial_vals)):
# points[i].set_data(ode_solns[i, :, :frame_final_time])
# current_points[i].set_data(*ode_solns[i, :, frame_final_time-1:frame_final_time])
# scale = np.sqrt(dvdt(t[frame_final_time], V, W)**2 + dwdt(t[frame_final_time], V, W)**2)
# qr.set_UVC(dvdt(t[frame_final_time], V, W)/scale, dwdt(t[frame_final_time], V, W)/scale, C=scale)
# title.set_text(f't = {t[frame_final_time] :.3f}')
# plt.pause(0.0001)
# back to static plot and animations
custom_plot_settings()
# plot static portion
fig, ax = plt.subplots(figsize=(5, 5))
ax.set_xlim(-2.5, 2.5)
ax.set_ylim(-2, 2)
ax.set_xlabel('$v(t)$')
ax.set_ylabel('$w(t)$')
plt.tight_layout()
# plot empty framework
points = np.zeros(len(initial_vals), dtype=object)
current_points = np.zeros(len(initial_vals), dtype=object)
for i in range(len(initial_vals)):
points[i], = ax.plot([], [], '.', color='black', alpha=0.05)
current_points[i], = ax.plot([], [], '.', color='red', alpha=0.2, zorder=10)
scale = np.sqrt(dvdt(t[0], V, W)**2 + dwdt(t[0], V, W)**2)
qr = ax.quiver(V, W, dvdt(t[0], V, W)/scale, dwdt(t[0], V, W)/scale,
scale, cmap='winter_r', scale=20, width=0.005, zorder=3)
title = ax.set_title('')
def draw_frame(n):
'''
Commands to update parameters.
Here, the phase portrait data points and quiver each frame.
'''
time_points = round(t_range/frame_num)
frame_final_time = min(time_points*n+time_points, t_range-1) # avoid index out of range
for i in range(len(initial_vals)):
points[i].set_data(ode_solns[i, :, :frame_final_time])
current_points[i].set_data(*ode_solns[i, :, frame_final_time-1:frame_final_time])
scale = np.sqrt(dvdt(t[frame_final_time], V, W)**2 + dwdt(t[frame_final_time], V, W)**2)
qr.set_UVC(dvdt(t[frame_final_time], V, W)/scale, dwdt(t[frame_final_time], V, W)/scale, C=scale)
title.set_text(f't = {t[frame_final_time] :.3f}')
return fig,
# create animation of given time length
# note here we fit all the data points into the given animation time
from matplotlib import animation
t_range = int(t_len/4) # manually set t range, default t_len
anim_time = 4 # s
fps = 60
frame_num = int(fps * anim_time)
anim = animation.FuncAnimation(fig, draw_frame, frames=frame_num, interval=1000/fps, blit=True)
plt.close() # disable showing initial frame
# convert animation to video (time-limiting step)
from IPython.display import HTML
HTML(anim.to_html5_video() + '<style>video{width: 400px !important; height: auto;}</style>')
▲ The above animation shows the time-dependent phase portrait of \(v(t)\) and \(w(t)\) in time interval \(t \in [0, 50]\). Even though the initial conditions are spread apart, they eventually goes into a loop centered around \((v, w) = (0, 0.5)\). Note that the slope field changes (oscillates) with time. The quivers with large angles that form a polynomial-like shape change the most over time.
Exploration: one-eyed phase portrait#
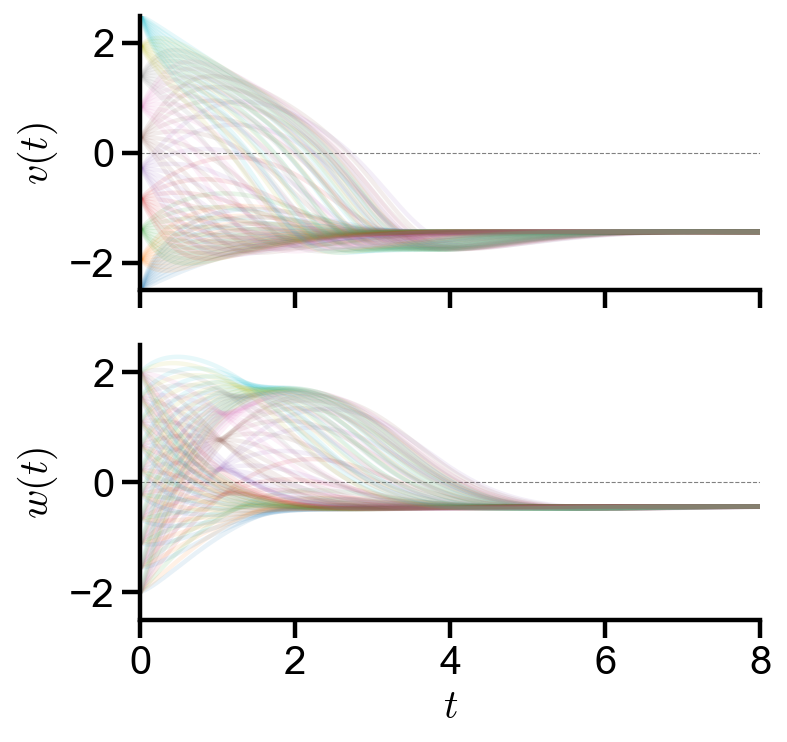
Problem Statement. With the initial conditions of \(v(0) = 1\) and \(w(0) = 0\), solve the FitzHugh-Nagumo model with parameters \(a=1, b=1, \tau=1\) and external current of \(I(t) = 0\).
Generate plots of \(v(t)\) and \(w(t)\) over time in the interval \(t \in [0, 8]\).
Generate an animated phase portrait over time in the interval \(t \in [0, 8]\).
# model params
a = 1
b = 1
tau = 1
# time array
t_initial = 0
t_final = 8
dt = 0.01
t = np.arange(t_initial, t_final+dt/2, dt)
t_len = len(t)
# ode system
I = lambda t : 0
dvdt = lambda t, v, w : v - 1/3*v**3 - w + I(t)
dwdt = lambda t, v, w : (a + v - b*w) / tau
ode_syst = lambda t, z : np.array([dvdt(t, *z), dwdt(t, *z)])
# grid of initial conditions
initial_vvec = np.linspace(-2.5, 2.5, 10)
initial_wvec = np.linspace(-2, 2, 10)
initial_vals = np.meshgrid(initial_vvec, initial_wvec)
initial_vals = np.array([initial_vals[0].reshape(-1), initial_vals[1].reshape(-1)]).T
# ode soln for grid of initial conditions
ode_solns = [0]*len(initial_vals)
for i in range(len(initial_vals)):
ode_solns[i] = scipy.integrate.solve_ivp(ode_syst, [t_initial, t_final], initial_vals[i], t_eval=t).y
ode_solns = np.array(ode_solns)
# quiver grid
vvec = np.linspace(-2.5, 2.5, 20)
wvec = np.linspace(-2, 2, 20)
V, W = np.meshgrid(vvec, wvec)
custom_plot_settings()
fig, axs = plt.subplots(2, 1, figsize=(5, 5), sharex=True)
axs[0].set_ylabel('$v(t)$')
axs[1].set_ylabel('$w(t)$')
axs[1].set_xlabel('$t$')
for i in range(len(initial_vals)):
axs[0].plot(t, ode_solns[i, 0], label='$v(t)$', alpha=0.1)
axs[1].plot(t, ode_solns[i, 1], label='$w(t)$', alpha=0.1)
for i in range(2):
axs[i].plot([t_initial, t_final], [0, 0], '--', color='grey', lw=0.5, zorder=0) # zero ref
axs[i].set_xlim(t_initial, t_final)
axs[i].set_ylim(-2.5, 2.5)
def make_animation(t_range=t_len, anim_time=4, fps=60, xmin=-2.5, xmax=2.5, ymin=-2, ymax=2):
'''
This function is notebook-specific and not meant to generalize to other settings.
Makes animation of time-dependent phase portrait.
Warning: Many parameters are taken from the global namespace. They need to be defined before use.
'''
# back to static plot and animations
custom_plot_settings()
# plot static portion
fig, ax = plt.subplots(figsize=(5, 5))
ax.set_xlim(xmin, xmax)
ax.set_ylim(ymin, ymax)
ax.set_xlabel('$v(t)$')
ax.set_ylabel('$w(t)$')
plt.tight_layout()
# plot empty framework
points = np.zeros(len(initial_vals), dtype=object)
current_points = np.zeros(len(initial_vals), dtype=object)
for i in range(len(initial_vals)):
points[i], = ax.plot([], [], '.', color='black', alpha=0.05)
current_points[i], = ax.plot([], [], '.', color='red', alpha=0.2, zorder=10)
scale = np.sqrt(dvdt(t[0], V, W)**2 + dwdt(t[0], V, W)**2)
qr = ax.quiver(V, W, dvdt(t[0], V, W)/scale, dwdt(t[0], V, W)/scale,
scale, cmap='winter_r', scale=20, width=0.005, zorder=3)
title = ax.set_title('')
def draw_frame(n):
'''
Commands to update parameters.
Here, the phase portrait data points and quiver each frame.
'''
time_points = round(t_range/frame_num)
frame_final_time = min(time_points*n+time_points, t_range-1) # avoid index out of range
for i in range(len(initial_vals)):
points[i].set_data(ode_solns[i, :, :frame_final_time])
current_points[i].set_data(*ode_solns[i, :, frame_final_time-1:frame_final_time])
scale = np.sqrt(dvdt(t[frame_final_time], V, W)**2 + dwdt(t[frame_final_time], V, W)**2)
qr.set_UVC(dvdt(t[frame_final_time], V, W)/scale, dwdt(t[frame_final_time], V, W)/scale, C=scale)
title.set_text(f't = {t[frame_final_time] :.3f}')
return fig,
# create animation of given time length
# note here we fit all the data points into the given animation time
from matplotlib import animation
frame_num = int(fps * anim_time)
anim = animation.FuncAnimation(fig, draw_frame, frames=frame_num, interval=1000/fps, blit=True)
plt.close() # disable showing initial frame
return anim
# convert animation to video (time-limiting step)
from IPython.display import HTML
anim = make_animation(); # uses custom function above
HTML(anim.to_html5_video() + '<style>video{width: 400px !important; height: auto;}</style>')
Exploration: loop phase portrait#
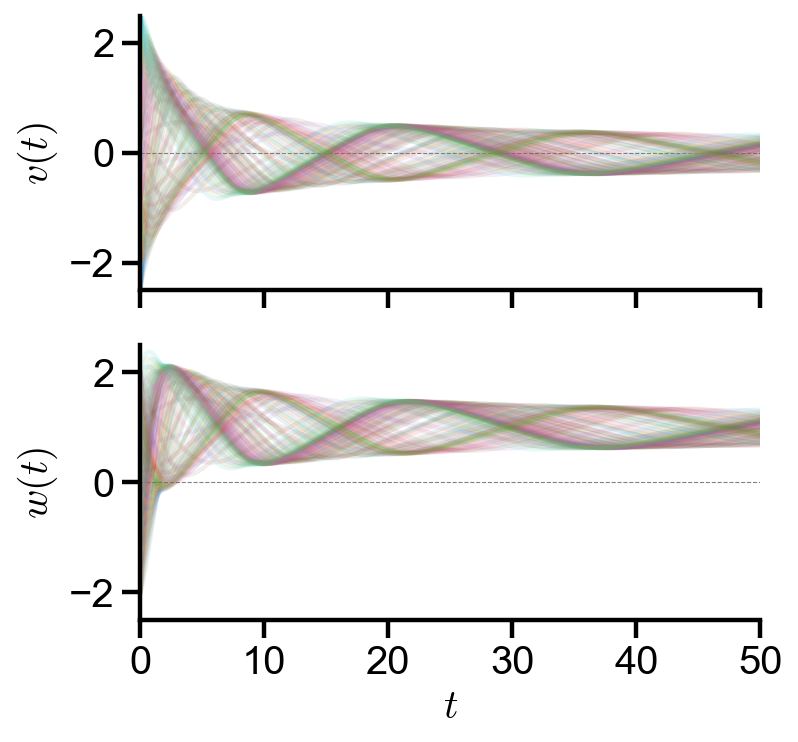
Problem Statement. With the initial conditions of \(v(0) = 1\) and \(w(0) = 0\), solve the FitzHugh-Nagumo model with parameters \(a=1, b=1, \tau=1\) and constant external current of \(I(t) = 1\).
Generate plots of \(v(t)\) and \(w(t)\) over time in the interval \(t \in [0, 50]\) and \(t \in [0, 12.5]\).
Generate an animated phase portrait over time in the interval \(t \in [0, 50]\) and \(t \in [0, 12.5]\).
# model params
a = 1
b = 1
tau = 1
# time array
t_initial = 0
t_final = 50
t = np.linspace(t_initial, t_final, 1000)
t_len = len(t)
# ode system
I = lambda t : 1
dvdt = lambda t, v, w : v - 1/3*v**3 - w + I(t)
dwdt = lambda t, v, w : (a + v - b*w) / tau
ode_syst = lambda t, z : np.array([dvdt(t, *z), dwdt(t, *z)])
# grid of initial conditions
initial_vvec = np.linspace(-2.5, 2.5, 10)
initial_wvec = np.linspace(-2, 2, 10)
initial_vals = np.meshgrid(initial_vvec, initial_wvec)
initial_vals = np.array([initial_vals[0].reshape(-1), initial_vals[1].reshape(-1)]).T
# ode soln for grid of initial conditions
ode_solns = [0]*len(initial_vals)
for i in range(len(initial_vals)):
ode_solns[i] = scipy.integrate.solve_ivp(ode_syst, [t_initial, t_final], initial_vals[i], t_eval=t).y
ode_solns = np.array(ode_solns)
# quiver grid
vvec = np.linspace(-2.5, 2.5, 20)
wvec = np.linspace(-2, 2, 20)
V, W = np.meshgrid(vvec, wvec)
custom_plot_settings()
fig, axs = plt.subplots(2, 1, figsize=(5, 5), sharex=True)
axs[0].set_ylabel('$v(t)$')
axs[1].set_ylabel('$w(t)$')
axs[1].set_xlabel('$t$')
for i in range(len(initial_vals)):
axs[0].plot(t, ode_solns[i, 0], label='$v(t)$', alpha=0.1)
axs[1].plot(t, ode_solns[i, 1], label='$w(t)$', alpha=0.1)
for i in range(2):
axs[i].plot([t_initial, t_final], [0, 0], '--', color='grey', lw=0.5, zorder=0) # zero ref
axs[i].set_xlim(t_initial, t_final)
axs[i].set_ylim(-2.5, 2.5)
# convert animation to video (time-limiting step)
from IPython.display import HTML
anim = make_animation() # uses custom function above
HTML(anim.to_html5_video() + '<style>video{width: 400px !important; height: auto;}</style>')
# convert animation to video (time-limiting step)
from IPython.display import HTML
anim = make_animation(t_range=int(t_len/4)) # uses custom function above
HTML(anim.to_html5_video() + '<style>video{width: 400px !important; height: auto;}</style>')
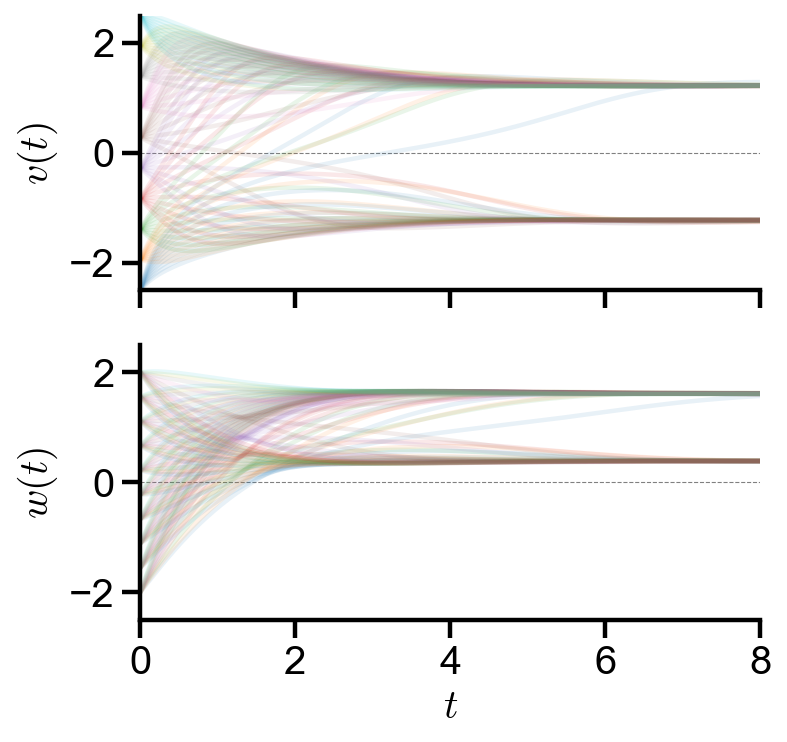
Exploration: two-eyed phase portrait#
Problem Statement. With the initial conditions of \(v(0) = 1\) and \(w(0) = 0\), solve the FitzHugh-Nagumo model with parameters \(a=2, b=2, \tau=2\) and constant external current of \(I(t) = 1\).
Generate plots of \(v(t)\) and \(w(t)\) over time in the interval \(t \in [0, 8]\).
Generate an animated phase portrait over time in the interval \(t \in [0, 8]\).
# model params
a = 2
b = 2
tau = 2
# time array
t_initial = 0
t_final = 8
dt = 0.01
t = np.arange(t_initial, t_final+dt/2, dt) #np.linspace(t_initial, t_final, 1000)
t_len = len(t)
# ode system
I = lambda t : 1
dvdt = lambda t, v, w : v - 1/3*v**3 - w + I(t)
dwdt = lambda t, v, w : (a + v - b*w) / tau
ode_syst = lambda t, z : np.array([dvdt(t, *z), dwdt(t, *z)])
# grid of initial conditions
initial_vvec = np.linspace(-2.5, 2.5, 10)
initial_wvec = np.linspace(-2, 2, 10)
initial_vals = np.meshgrid(initial_vvec, initial_wvec)
initial_vals = np.array([initial_vals[0].reshape(-1), initial_vals[1].reshape(-1)]).T
# ode soln for grid of initial conditions
ode_solns = [0]*len(initial_vals)
for i in range(len(initial_vals)):
ode_solns[i] = scipy.integrate.solve_ivp(ode_syst, [t_initial, t_final], initial_vals[i], t_eval=t).y
ode_solns = np.array(ode_solns)
# quiver grid
vvec = np.linspace(-2.5, 2.5, 20)
wvec = np.linspace(-2, 2, 20)
V, W = np.meshgrid(vvec, wvec)
custom_plot_settings()
fig, axs = plt.subplots(2, 1, figsize=(5, 5), sharex=True)
axs[0].set_ylabel('$v(t)$')
axs[1].set_ylabel('$w(t)$')
axs[1].set_xlabel('$t$')
for i in range(len(initial_vals)):
axs[0].plot(t, ode_solns[i, 0], label='$v(t)$', alpha=0.1)
axs[1].plot(t, ode_solns[i, 1], label='$w(t)$', alpha=0.1)
for i in range(2):
axs[i].plot([t_initial, t_final], [0, 0], '--', color='grey', lw=0.5, zorder=0) # zero ref
axs[i].set_xlim(t_initial, t_final)
axs[i].set_ylim(-2.5, 2.5)
# convert animation to video (time-limiting step)
from IPython.display import HTML
anim = make_animation() # uses custom function above
HTML(anim.to_html5_video() + '<style>video{width: 400px !important; height: auto;}</style>')