Two-Eyed Monster#
Teng-Jui Lin
Content adapted from UW AMATH 301, Beginning Scientific Computing, in Spring 2020.
Phase portraits
“Two-eyed monster”
Two-eyed monster#
The system of ODEs
is called the “two-eyed monster.”
Static phase portrait#
Problem Statement. Consider the “two-eyed monster” system of ODEs.
(a) Plot the phase portrait of the ODE system with the initial conditions of the equidistant grid of points in \((x, y) \in [-5, 3] \times [-3, 2]\) with \(\Delta x = \Delta y = 0.5\) from times \(t \in [0, 100]\).
(b) Plot the phase portrait of the ODE system with the initial conditions (x, y) of
[0.01, 0], [-1, -3], [-3, -2], [-2, -3], [1, -3], [-3, 0], [-3, -1]
with \(\Delta x = \Delta y = 0.5\) for times \(t \in [0, 100]\).
import numpy as np
import matplotlib.pyplot as plt
import scipy
from scipy import integrate
# quiver grid and initial conditions
xvec = np.linspace(-5, 3, 15)
yvec = np.linspace(-3, 2, 15)
X, Y = np.meshgrid(xvec, yvec)
initial_vals = np.meshgrid(xvec, yvec)
initial_vals = np.array([initial_vals[0].reshape(-1), initial_vals[1].reshape(-1)]).T
# time array
t_initial = 0
t_final = 100
dt = 0.1
t = np.arange(t_initial, t_final+dt/2, dt)
# ode system
dxdt = lambda x, y : y + y**2
dydt = lambda x, y : -0.5*x + 0.2*y - x*y + 1.2*y**2
ode_syst = lambda t, z : np.array([dxdt(*z), dydt(*z)])
def custom_plot_settings():
%config InlineBackend.figure_format = 'retina'
%matplotlib inline
plt.rcParams.update({
'font.family': 'Arial', # Times New Roman, Calibri
'font.weight': 'normal',
'mathtext.fontset': 'cm',
'font.size': 18,
'lines.linewidth': 2,
'axes.linewidth': 2,
'axes.spines.top': False,
'axes.spines.right': False,
'axes.titleweight': 'bold',
'axes.titlesize': 18,
'axes.labelweight': 'bold',
'xtick.major.size': 8,
'xtick.major.width': 2,
'ytick.major.size': 8,
'ytick.major.width': 2,
'figure.dpi': 80,
'savefig.dpi': 300,
'legend.framealpha': 1,
'legend.edgecolor': 'black',
'legend.fancybox': False,
'legend.fontsize': 14,
'animation.html': 'html5',
})
custom_plot_settings()
fig, ax = plt.subplots(figsize=(7, 7))
# slope field
scale = np.sqrt(dxdt(X, Y)**2 + dydt(X, Y)**2)
ax.quiver(X, Y, dxdt(X, Y)/scale, dydt(X, Y)/scale, scale, cmap='winter_r', scale=20, width=0.005) # regular
# plot settings
ax.set_xlim(-5, 3)
ax.set_ylim(-3, 2)
ax.set_xlabel('$x$')
ax.set_ylabel('$y$')
ax.set_title('Phase Portrait')
ax.set_aspect('equal')
for i in range(len(initial_vals)):
# ode soln
ode_soln = scipy.integrate.solve_ivp(ode_syst, [t_initial, t_final], initial_vals[i], t_eval=t)
# phase portrait
ax.plot(ode_soln.y[0], ode_soln.y[1], color='black', zorder=0.5)
ax.plot(ode_soln.y[0, -1], ode_soln.y[1, -1], '.', color='red', zorder=4)
ax.plot(*initial_vals[i], '.', color='black')
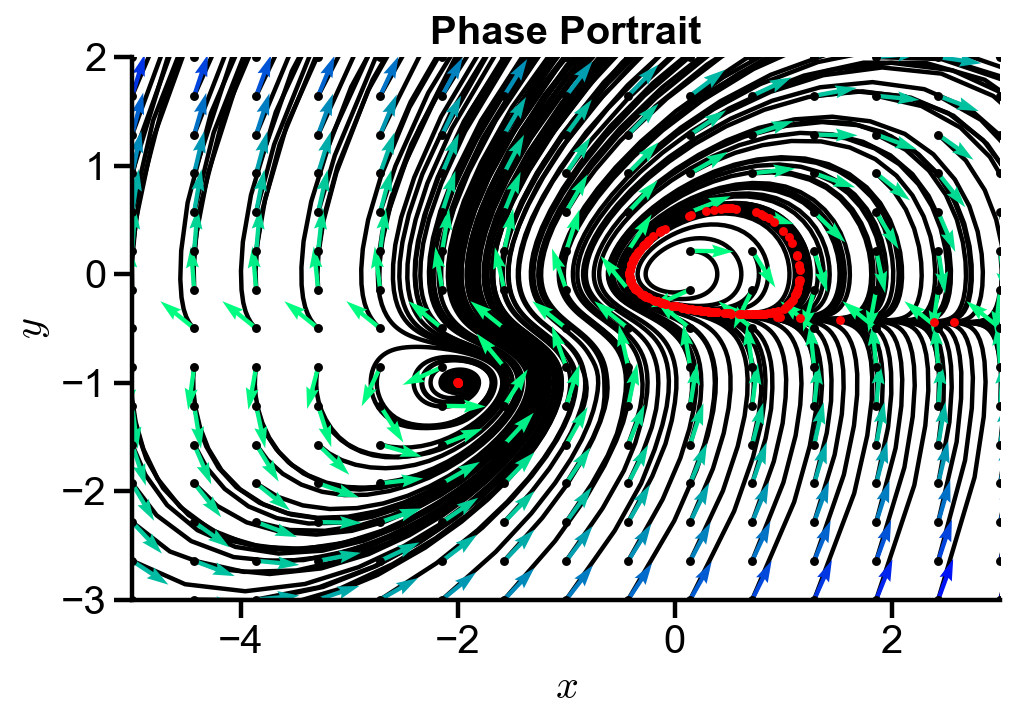
▲ The figure above shows the trajectories of a grid of initial conditions for the two-eyed monster system. Most of the initial conditions spiral into the two eyes and form loops around the eyes. The final state denoted in red forms a loop about the eye or is at the eye center.
# initial conditions [x0, y0]
initial_vals = np.array([[0.01, 0], [-1, -3], [-3, -2], [-2, -3], [1, -3], [-3, 0], [-3, -1]])
# quiver grid
xvec = np.linspace(-3, 1.5, 20)
yvec = np.linspace(-2, 1, 20)
X, Y = np.meshgrid(xvec, yvec)
fig, ax = plt.subplots(figsize=(5, 5))
# slope field
scale = np.sqrt(dxdt(X, Y)**2 + dydt(X, Y)**2)
ax.quiver(X, Y, dxdt(X, Y)/scale, dydt(X, Y)/scale, scale, cmap='winter_r', scale=20, width=0.005) # regular
# plot settings
ax.set_xlim(-3, 1.5)
ax.set_ylim(-2, 1)
ax.set_xlabel('$x$')
ax.set_ylabel('$y$')
ax.set_title('Phase Portrait')
ax.set_aspect('equal')
for i in range(len(initial_vals)):
# ode soln
ode_soln = scipy.integrate.solve_ivp(ode_syst, [t_initial, t_final], initial_vals[i], t_eval=t)
# phase portrait
ax.plot(ode_soln.y[0], ode_soln.y[1], color='black')
ax.plot(ode_soln.y[0, -1], ode_soln.y[1, -1], '.', color='red', zorder=4)
ax.plot(*initial_vals[i], '.', color='black')
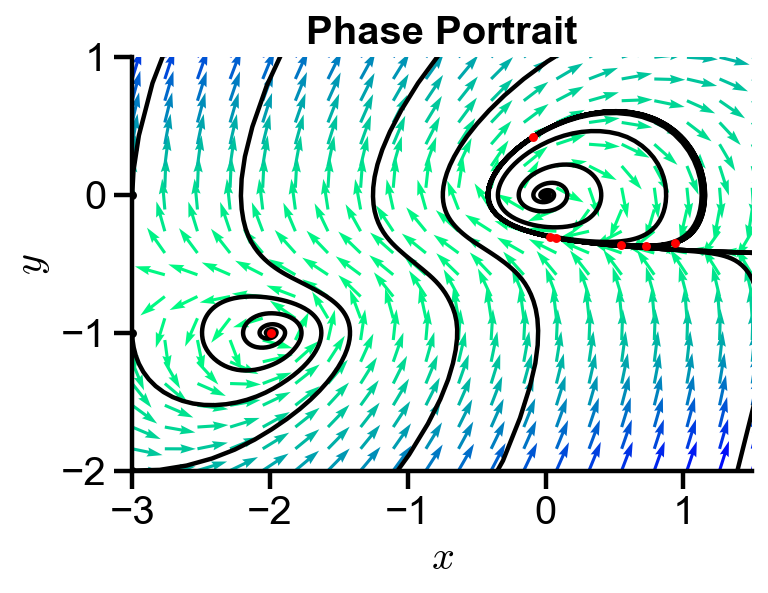
▲ The figure above shows the trajectories of particular initial conditions for the two-eyed monster system. The trajectory spirals into the eyes or curve around the eyes.
Animated phase portrait#
Note on animation: for local reproducible results, download ffmpeg and add to path variable. For reproducible results online, use Google Colab and run the command below.
# Run the command in Google Colab for reproducible results online
# !apt install ffmpeg
# time array
t_initial = 0
t_final = 50
dt = 0.1
t = np.arange(t_initial, t_final+dt/2, dt)
t_len = len(t)
# ode system
dxdt = lambda x, y : y + y**2
dydt = lambda x, y : -0.5*x + 0.2*y - x*y + 1.2*y**2
ode_syst = lambda t, z : np.array([dxdt(*z), dydt(*z)])
# quiver grid and initial conditions
xvec = np.linspace(-5, 3, 15)
yvec = np.linspace(-3, 2, 15)
X, Y = np.meshgrid(xvec, yvec)
initial_vals = np.meshgrid(xvec, yvec)
initial_vals = np.array([initial_vals[0].reshape(-1), initial_vals[1].reshape(-1)]).T
# ode soln for grid of initial conditions
ode_solns = [0]*len(initial_vals)
for i in range(len(initial_vals)):
ode_solns[i] = scipy.integrate.solve_ivp(ode_syst, [t_initial, t_final], initial_vals[i], t_eval=t).y
ode_solns = np.array(ode_solns)
custom_plot_settings()
fig, axs = plt.subplots(2, 1, figsize=(5, 5), sharex=True)
axs[0].set_ylabel('$x(t)$')
axs[1].set_ylabel('$y(t)$')
axs[1].set_xlabel('$t$')
axs[0].set_ylim(-5, 50)
axs[1].set_ylim(-5, 25)
for i in range(len(initial_vals)):
axs[0].plot(t, ode_solns[i, 0], label='$x(t)$', alpha=0.1)
axs[1].plot(t, ode_solns[i, 1], label='$y(t)$', alpha=0.1)
for i in range(2):
axs[i].plot([t_initial, t_final], [0, 0], '--', color='grey', lw=0.5, zorder=0) # zero ref
axs[i].set_xlim(t_initial, t_final)
custom_plot_settings()
fig, axs = plt.subplots(2, 1, figsize=(5, 5), sharex=True)
axs[0].set_ylabel('$x(t)$')
axs[1].set_ylabel('$y(t)$')
axs[1].set_xlabel('$t$')
axs[0].set_ylim(-0.5, 2)
axs[1].set_ylim(-1, 1)
for i in range(len(initial_vals)):
axs[0].plot(t, ode_solns[i, 0], label='$x(t)$', alpha=0.1)
axs[1].plot(t, ode_solns[i, 1], label='$y(t)$', alpha=0.1)
for i in range(2):
axs[i].plot([t_initial, t_final], [0, 0], '--', color='grey', lw=0.5, zorder=0) # zero ref
axs[i].set_xlim(t_initial, t_final)
def make_animation(t_range=t_len, anim_time=4, fps=60, xmin=-5, xmax=3, ymin=-3, ymax=2):
'''
This function is notebook-specific and not meant to generalize to other settings.
Makes animation of time-dependent phase portrait.
Warning: Many parameters are taken from the global namespace. They need to be defined before use.
'''
# back to static plot and animations
custom_plot_settings()
# plot static portion
fig, ax = plt.subplots(figsize=(8/1.2, 5/1.2))
ax.set_xlim(xmin, xmax)
ax.set_ylim(ymin, ymax)
ax.set_xlabel('$x(t)$')
ax.set_ylabel('$y(t)$')
ax.set_aspect('equal')
plt.tight_layout()
# plot empty framework
points = np.zeros(len(initial_vals), dtype=object)
current_points = np.zeros(len(initial_vals), dtype=object)
for i in range(len(initial_vals)):
points[i], = ax.plot([], [], '.', color='black', alpha=0.05)
current_points[i], = ax.plot([], [], '.', color='red', alpha=0.2, zorder=10)
scale = np.sqrt(dxdt(X, Y)**2 + dydt(X, Y)**2)
qr = ax.quiver(X, Y, dxdt(X, Y)/scale, dydt(X, Y)/scale,
scale, cmap='winter_r', scale=20, width=0.005, zorder=3)
title = ax.set_title('')
def draw_frame(n):
'''
Commands to update parameters.
Here, the phase portrait data points and quiver each frame.
'''
time_points = round(t_range/frame_num)
frame_final_time = min(time_points*n+time_points, t_range-1) # avoid index out of range
for i in range(len(initial_vals)):
points[i].set_data(ode_solns[i, :, :frame_final_time])
current_points[i].set_data(*ode_solns[i, :, frame_final_time-1:frame_final_time])
scale = np.sqrt(dxdt(X, Y)**2 + dydt(X, Y)**2)
qr.set_UVC(dxdt(X, Y)/scale, dydt(X, Y)/scale, C=scale)
title.set_text(f't = {t[frame_final_time] :.3f}')
return fig,
# create animation of given time length
# note here we fit all the data points into the given animation time
from matplotlib import animation
frame_num = int(fps * anim_time)
anim = animation.FuncAnimation(fig, draw_frame, frames=frame_num, interval=1000/fps, blit=True)
plt.close() # disable showing initial frame
return anim
# convert animation to video (time-limiting step)
from IPython.display import HTML
anim = make_animation() # uses custom function above
HTML(anim.to_html5_video() + '<style>video{width: 400px !important; height: auto;}</style>')
# convert animation to video (time-limiting step)
from IPython.display import HTML
anim = make_animation(t_range=int(t_len/2)) # uses custom function above
HTML(anim.to_html5_video() + '<style>video{width: 400px !important; height: auto;}</style>')